Real-Time Linux on the Raspberry Pi
Some ten years ago I learned that it is possible to turn Linux into a real-time operating system by applying the PREEMPT_RT patch set. I was more than fascinated by the opportunity of combining a general purpose operating system with a real-time operating system and I immediately started to assess the maturity of the approach. After a thorough investigation I finally concluded that PREEMPT_RT patched Linux was a great match for the industrial machines that I was helping to build at that time. Today I am very happy that a lot of other companies have chosen the same approach and that PREEMPT_RT patched Linux has not only survived until today but that it has grown into a solution that is widely used. I am also very grateful that the kernel developers have continued their journey despite impediments.
Recently I did a short presentation about this topic and to give some more insights I compiled a PREEMPT_RT patched kernel for my Raspberry Pi 3 that is running arm64 Debian.
Building the Kernel
To speed up the kernel build the below steps are executed within a cross compilation container.
Therefore we enter the container first, install some required packages and prepare a work folder:
ssh IP_OF_EDI_PI_CROSS_DEV
sudo apt install build-essential bc kmod cpio flex cpio libncurses5-dev bison libssl-dev wget
mkdir -p ~/edi-workspace/rt-kernel && cd ~/edi-workspace/rt-kernel
Now we download the kernel source and the matching PREEMPT_RT patch:
wget https://mirrors.edge.kernel.org/pub/linux/kernel/v4.x/linux-4.19.8.tar.xz
wget https://cdn.kernel.org/pub/linux/kernel/projects/rt/4.19/older/patch-4.19.8-rt6.patch.xz
Finally we extract the source code and apply the PREEMPT_RT patch:
tar xf linux-4.19.8.tar.xz
cd linux-4.19.8
xzcat ../patch-4.19.8-rt6.patch.xz | patch -p1
As a next step we grab a kernel configuration from the Raspberry Pi project and we do a
make olddefconfig:
wget -O .config https://raw.githubusercontent.com/raspberrypi/linux/rpi-4.18.y/arch/arm64/configs/bcmrpi3_defconfig
make ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- olddefconfig
And now we want to switch on the feature “Fully Preemptible Kernel” (CONFIG_PREEMPT_RT_FULL):
make ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- menuconfig
Within the menu navigate to General Setup/Preemption Model and choose Fully Preemptible Kernel.
Not related to PREEMPT_RT we need another modification:
Navigate back to the root menu by choosing Exit and choose Boot options. Make sure that the Default kernel command string is completely empty. Choose Exit twice and do not forget to save the configuration.
Finally we compile the kernel and wrap it into a Debian package:
make -j $(nproc) KBUILD_IMAGE=arch/arm64/boot/Image ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- deb-pkg
Testing the Real-Time Kernel
Now we copy the resulting kernel from our Ubuntu host to the Raspberry Pi:
scp ~/edi-workspace/rt-kernel/linux-image-4.19.8-rt6-v8_4.19.8-rt6-v8-1_arm64.deb pi@IP_OF_RASPBERRY:
For benchmarking the kernel we install the cyclictest executable on the Raspberry Pi (default password is raspberry):
ssh pi@IP_OF_RASPBERRY
sudo apt update && sudo apt install rt-tests
Before we install the real-time kernel we do a small benchmark:
pi@raspberry:~$ sudo cyclictest -p 99 -t5 -n -i250
# /dev/cpu_dma_latency set to 0us
policy: fifo: loadavg: 1.57 0.69 0.28 1/104 5233
T: 0 ( 4835) P:99 I:250 C: 372513 Min: 14 Act: 27 Avg: 29 Max: 3009
T: 1 ( 4836) P:99 I:750 C: 124311 Min: 18 Act: 28 Avg: 29 Max: 590
T: 2 ( 4837) P:99 I:1250 C: 74550 Min: 18 Act: 22 Avg: 34 Max: 2803
T: 3 ( 4838) P:99 I:1750 C: 53268 Min: 20 Act: 32 Avg: 35 Max: 4747
T: 4 ( 4839) P:99 I:2250 C: 41436 Min: 22 Act: 31 Avg: 35 Max: 2255
Now we install the patched kernel, reboot …
sudo dpkg -i linux-image-4.19.8-rt6-v8_4.19.8-rt6-v8-1_arm64.deb
sudo reboot
sleep 60
ssh pi@IP_OF_RASPBERRY
… and repeat the benchmark:
pi@raspberry:~$ sudo cyclictest -p 99 -t5 -n -i250
# /dev/cpu_dma_latency set to 0us
policy: fifo: loadavg: 2.87 1.60 0.67 1/120 1315
T: 0 ( 603) P:99 I:250 C: 771448 Min: 17 Act: 33 Avg: 35 Max: 177
T: 1 ( 604) P:99 I:750 C: 257149 Min: 18 Act: 35 Avg: 38 Max: 205
T: 2 ( 605) P:99 I:1250 C: 154289 Min: 18 Act: 29 Avg: 35 Max: 145
T: 3 ( 606) P:99 I:1750 C: 110206 Min: 18 Act: 29 Avg: 37 Max: 148
T: 4 ( 607) P:99 I:2250 C: 85716 Min: 18 Act: 32 Avg: 36 Max: 164
As you can see, the PREEMPT_RT patch set brought down the maximum latency from about 5ms to about 200us!
Architectural Considerations
With a PREEMPT_RT patched Linux kernel you can build a system according to this picture:
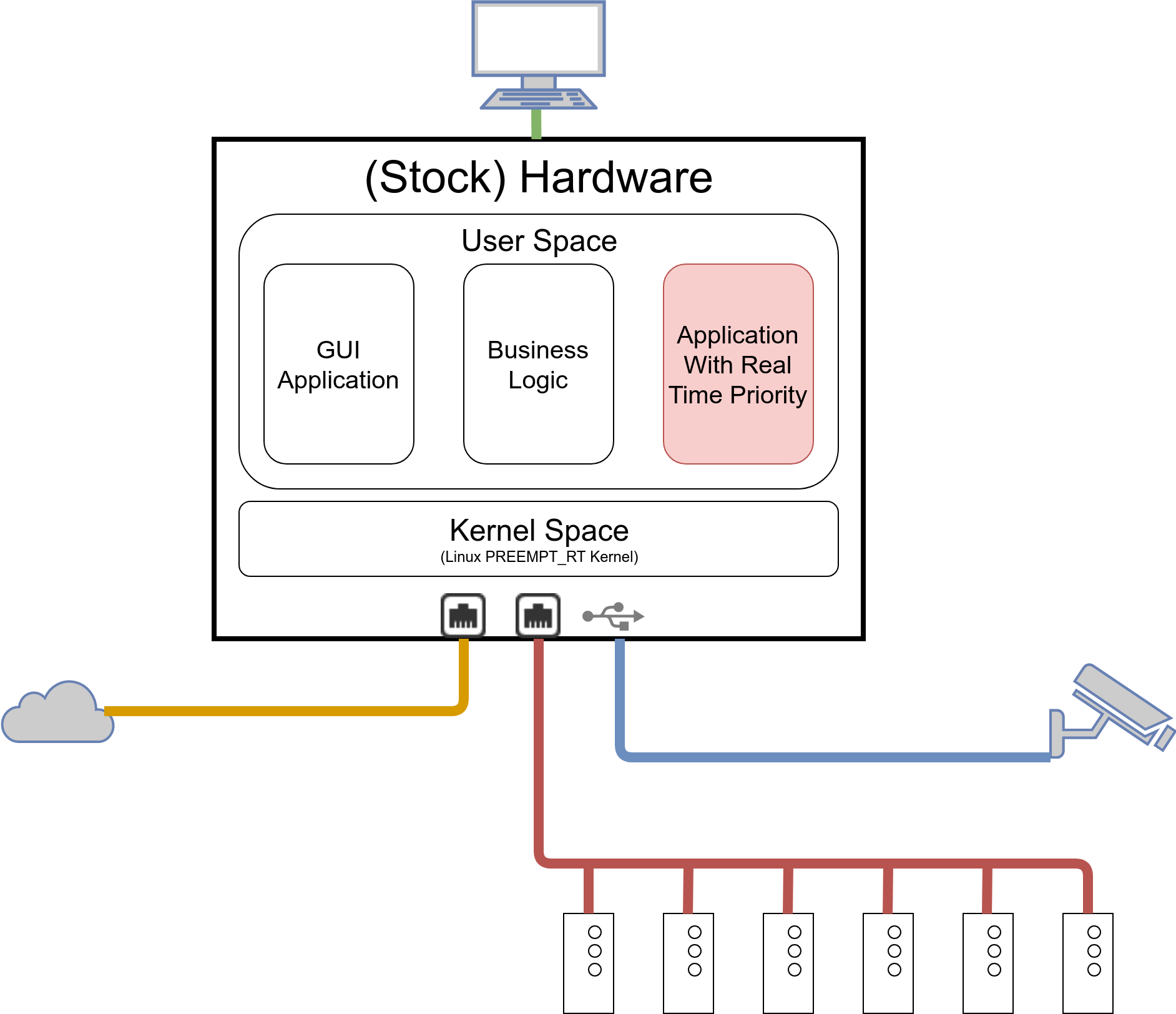
The solution comes with the following design parameters:
- Real-time Linux can run on standard hardware.
- A GUI process can run on the same machine as the real-time process.
- The best supported CPU architecture is amd64.
- Real-time applications can run in user space.
- Plain C/C++ is suitable for real-time application development.
- With a decent hardware you can operate a fieldbus with update cycles of up to 5kHz.
- Thanks to the CPU power of the Linux box and its real-time behavior you can centrally control complex multi axis machines with relatively dumb fieldbus controller nodes.
- Many processing tasks can be moved from the fieldbus node to the Linux box.
However, I strongly recommend to keep the real-time application slim as you can easily run into troubles when trying to squeeze everything into one process with real-time priorities.
Conclusion
PREEMPT_RT patched Linux is heavily used in industry as it is a brilliant combination of a general purpose operating system with a real time operating system. In many cases it is a suitable replacement for proprietary real-time operating systems.
It would be great if you could convince your company to sponsor the PREEMPT_RT development so that it can finally fully slip into the Linux mainline kernel.
Leave a comment