Debian Bullseye Upgrade for the Raspberry Pi
About every second year there is a new Debian release. This time it is Debian bullseye and therefore an update of the edi-pi project configuration was imminent.
However, there was an issue that bugged me more than the release upgrade: Fix the dtb handling during A/B update.
Time to solve it:
New Bootloader Integration for the Pi 4
The edi-pi project configuration comes with a Mender enabled A/B partition setup that enables the devices to get updated over the air in a robust manner. However, for the Raspberry Pi 4 there was an unsolved issue that made it impossible to swap the device tree binaries and the kernel at the very same time as kind of an “atomic operation”. Many industry and longevity focused projects struggled with similar setup issues and came up with various workarounds. Luckily the Raspberry Pi foundation has listened to its customers and implemented the yet pretty undocumented “tryboot” feature. The good news is that this “tryboot” feature can now take over the fail-safe handling that was previously done by U-Boot (bootcount implementation). This led to an implementation that comes with a small pi-uboot script that makes Mender client believe it is still dealing with U-Boot:
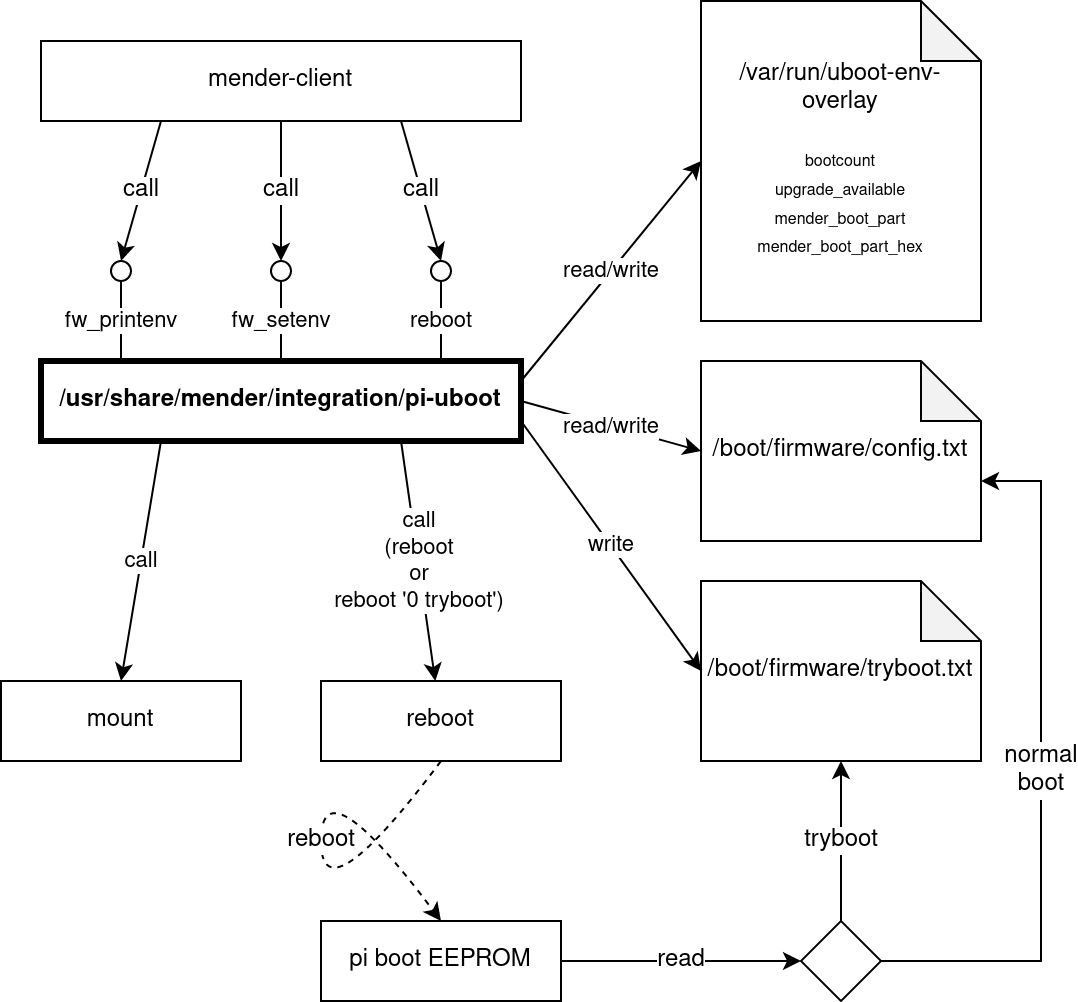
The boot partition looks as follows:
pi@raspberry:~$ tree /boot/firmware/
/boot/firmware/
|-- config.txt
|-- p3
| |-- bcm2711-rpi-4-b.dtb
| |-- cmdline.txt
| |-- overlays
| | |-- gpio-ir-tx.dtbo
| | |-- gpio-ir.dtbo
| | `-- vc4-fkms-v3d.dtbo
| `-- vmlinuz
|-- p3fixup4.dat
|-- p3start4.elf
|-- p4
| |-- bcm2711-rpi-4-b.dtb
| |-- cmdline.txt
| |-- overlays
| | |-- gpio-ir-tx.dtbo
| | |-- gpio-ir.dtbo
| | `-- vc4-fkms-v3d.dtbo
| `-- vmlinuz
|-- p4fixup4.dat
`-- p4start4.elf
The config.txt (or eventually the tryboot.txt) has the following content:
pi@raspberry:~$ cat /boot/firmware/config.txt
# needs to be 8.3 format and in top level folder
start_file=p4start4.elf
fixup_file=p4fixup4.dat
# Switch the CPU from ARMv7 into ARMv8 (aarch64) mode
arm_64bit=1
enable_uart=1
kernel=vmlinuz
os_prefix=p4/
The above setup shows, that not only the kernel (vmlinuz), the device tree (bcm2711-rpi-4-b.dtb + overlays) but also important bootloader components (pXstart4.elf, pXfixup4.dat) get upgraded in a robust manner. Only the bootloader EEPROM remains unchanged. The Linux kernel is installed through a standard Debian package and edi-boot-shim makes sure that the kernel and the device tree binaries end up on the right partition. The U-Boot binary is no longer needed. All the fine-tuning of config.txt and cmdline.txt can now be modified during an OTA update without the risk of bricking the device.
NetworkManager Replaces ifupdown
After some evaluation I decided to replace ifupdown with NetworkManager:
pi@raspberry:~$ nmcli con show
NAME UUID TYPE DEVICE
my-wifi 398c8116-b0ea-4303-993d-5a4f7544e3d2 wifi wlan0
Wired connection 1 4cf0b75b-aa66-329d-9445-04eefb76ce24 ethernet --
This is especially beneficial for setups where also ModemManager is involved (e.g. LTE connection). Furthermore, NetworkManager is faster on reacting to network topology changes (e.g. plugging and unplugging network cables) and it also integrates with firewalld.
The network settings now get persisted during a full OS update. This guarantees that a Mender update is successful even if the device is connected to a protected WiFi network.
GUI Passthrough
The “digital twin” container remains a very important feature of the setup. It is now even by default possible to run a GUI application within the (development) container:
Further Changes
There were some additional changes that made it into this updated setup:
- The ssh host keys get persisted during the full OS update.
- A bug that lead to a non-unique machine-id got fixed.
- Various things got aligned with the edi-var and edi-cl project configurations.
Conclusion
Especially for the Raspberry Pi 4 the changes are a breakthrough as now a robust OTA update is possible. The implementation provided here might also be beneficial for various Yocto projects that are dealing with the Raspberry Pi.
As usual, also the new Debian release delivers a lot of updates and new features. E.g. Podman became part of the Debian package repository. The daemonless container engine approach might be very interesting for embedded projects!
Leave a comment